1. Introduction¶
Like other members of the Simpact family, Simpact Cyan is an agent based model (ABM) to study the way an infection spreads and can be influenced, and is currently focused on HIV. The program models each individual in a population of a specified initial size. Things that can happen are represented by events, which can have a certain risk of being executed at a certain moment. Time advances by iteratively finding the next event that will take place, updating the time to the corresponding value and executing event-specific code. The way this is implemented, is using the Modified Next Reaction Method [Anderson].
Note that event times and time-related properties that can be configured are expressed in units of years, unless stated otherwise.
1.1. Modified Next Reaction Method (mNRM) & hazards¶
In the mNRM algorithm, there is a core distinction between internal event times and real-world event times. The internal event times determine when an event will go off according to some notion of an internal clock. Let’s call the internal time interval until a specific event fires \(\Delta T\). Such internal time intervals are chosen using a simple method, typically as random numbers picked from an exponential distribution:
Events in the simulation will not just use such internal times, they need to be executed at a certain real-world time. Calling \(\Delta t\) the real-world time interval that corresponds to the internal time interval \(\Delta T\), this mapping is done using the notion of a hazard (called propensity function in the mNRM article) \(h\):
It is this hazard that can depend on the state \(X\) of the simulation, and perhaps also explicitly on time. The state of the simulation in our case, can be thought of as the population: who has relationships with whom, who is infected, how many people are there etc. This state \(X(t)\) does not continuously depend on time: the state only changes when events get fired, which is when their internal time interval passes. Note that the formula above is for a single event, and while \(\Delta T\) itself is not affected by other events, the mapping into \(\Delta t\) certainly can be: other events can change the state, and the hazard depends on this state.
The figure below illustrates the main idea: internal time intervals are chosen from a certain distribution, and they get mapped onto real-world time intervals through hazards. Because hazards can depend both on the state (so the time until an event fires can be influenced by other events that manipulate this state), and can have an explicit time dependency, this mapping can be quite complex:
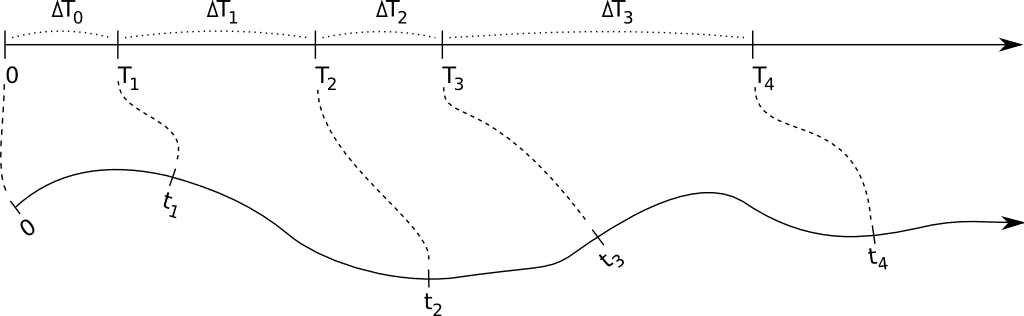
The hazard can cause complex behaviour, but of course this is not necessarily the case. If one uses a constant hazard, this simply causes a scaling between internal time \(\Delta T\) and real-world time \(\Delta t\):
This also illustrates that the higher the hazard, the earlier the event will fire, i.e. the real-world time interval will be smaller.
As an example, let’s consider formation events. At a certain time in the simulation, many formation events will be scheduled, one event for each man/woman pair that can possibly form a relationship. The internal time interval for each of these events will simply be picked from the simple exponential distribution that was mentioned above. The mapping to a real-world time at which the event will fire, is calculated using the hazard-based method, and this hazard depends on many things (the state): how many relationships does the man have at a certain time, how many relationships does the woman have, what is the preferred age difference etc. One can also imagine that there can be an explicit time dependency in the hazard: perhaps the hazard of forming a relationship increases if the time since the relationship became possible goes up.
Using an exponential distribution to generate an internal time interval is how the method is described in the [Anderson] article. It is of course not absolutely necessary to do this, and other ways to generate an internal time are used as well. The simplest example, is if one wants to have an event that fires at a specific time. In that case, \(\Delta T\) can simply be set to the actual real-world time until the event needs to fire, and the hazard can be set to \(h=1\), so that internal and real-world time intervals match. Among others, this is done in the HIV seeding event which, when triggered, starts the epidemic by marking a certain amount of people as infected.
1.2. Population based simulation¶
Each time an event is triggered, the state of the simulation is allowed to change. Because the hazard of any event can depend on this state, in the most general version of the mNRM algorithm, one would recalculate the real-world event fire times of all remaining events each time a particular event gets triggered. This ensures that the possibly changed state is taken into account. Recalculating all event fire times all the time, is of course very inefficient: although the state may have been changed somewhat, this change may not be relevant for many of the event hazards in use. As a result, the calculated real-world fire times would be mostly the same as before.
In the Simpact model, the state can be thought of as the population that is being simulated, where the population consists of persons. Each person is linked to a list of events that involve him or her, and if an event is relevant to more than one person it will be present in the lists of more than one person. For example, a mortality event would be present in the list of only one person, while a relationship formation event is about two distinct people and would therefore be present in two such lists. The figure below illustrates this idea:
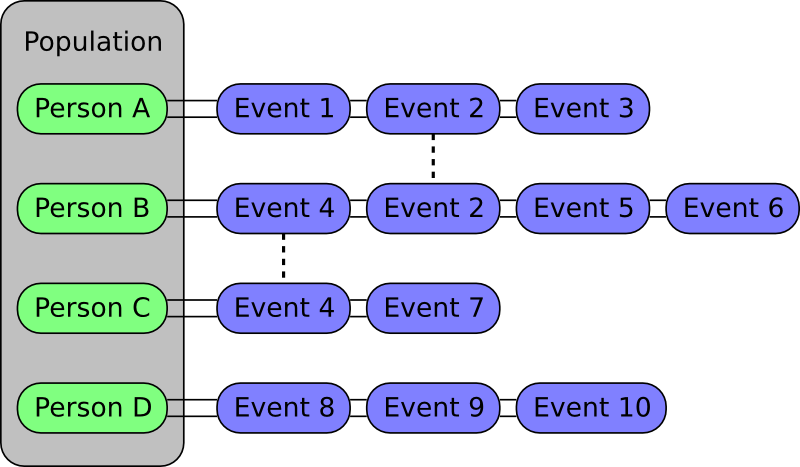
When an event fires, it is assumed that only the properties of a very limited set of people
have changed, and that one only needs to recalculate the fire times of the events in those
people’s lists. For example, if Event 2 from the figure above fires, then the real-world
fire times for the events in the lists of Person A and Person B will be automatically
recalculated. Apart from affecting the people in whose lists an event appears, an event can
also indicate that other people are affected. As an example, a birth event will only
appear in the list of the woman who’s pregnant. However, when triggered this event indicates
that the father is also an affected person (in case the amount of children someone has is used
in a hazard). In general, this number of other affected people will be very small compared to
the size of the population, causing only a fraction of the event fire times to be recalculated.
This allows this population-based algorithm to run much faster than the very basic algorithm
that always recalculates all event times.
Besides these types of events, there are also ‘global’ events. These events do not refer to a particular person and will modify the state in a very general way. In general, when such a global event is triggered, this causes all other event fire times to be recalculated.
1.3. ‘Time limited’ hazards¶
In the mNRM algorithm, time advances in steps, from one event fire time to the next. In general, these event fire times are calculated by mapping a generated internal time interval \(\Delta T\) onto a real-world time interval \(\Delta t\) using the formula
where \(h\) is the hazard that can have an explicit time dependency and a dependency on the simulation state. While the simulation state can change over time, it can only change at discrete points, when other events change the state.
The form of the hazard determines how fast this mapping between internal times and real-world times can be calculated. To keep the simulation as fast as possible, hazards for which the integral has an analytic solution are certainly most interesting. Furthermore, because the mapping between internal and real-world times needs to be done in each direction, the resulting equation for \(\Delta T\) needs to be invertible as well.
The hazards that we use in the Simpact events are often of the form
This is a time dependent hazard where \(A\) and \(B\) are determined by other values in the simulation state. The nice feature of such a hazard is that it is always positive, as a hazard should be (otherwise the mapping could result in simulation time going backwards). Unfortunately, this form also has a flaw: consider the example where \(A = 0\), \(B = -1\) and \(t_{\rm prev} = 0\) for conciseness. The mapping between times then becomes
When we need to map a specific \(\Delta t\) onto an internal \(\Delta T\), this expression can be used to do this very efficiently. When we need the reverse, rewriting this equation gives:
From this it is clear that it is only possible if \(\Delta T\) is smaller than one, which may not be the case since \(\Delta T\) is picked from an exponential probability distribution in general. The core problem is that the integral in our expression is bounded, suggesting an upper limit on \(\Delta T\), but on the other hand that \(\Delta T\) needs to be able to have any positive value since it is picked from an exponential distribution which does not have an upper limit.
To work around this, we use a slightly different hazard, one that becomes constant after a certain time \(t_{\rm max}\), as is illustrated in the figure below. This has the effect that the integral will no longer have an upper bound, and the mapping from \(\Delta T\) to \(\Delta t\) will always be possible.

We are calculating a different hazard than before of course, so you may wonder whether this is really a good idea. In this respect, it is important to note that we’re simulating individuals that will not live forever, but have a limited lifespan. So if we set \(t_{\rm max}\) to the time at which the relevant person would be 200 years old (for example), we can be very sure that our choice for \(t_{\rm max}\) will not affect the simulation. It only helps to keep the calculations feasible.
Above, the basic problem and solution are illustrated using a simple time dependent exponential hazard, but it should be clear that the problem occurs for other hazards as well: one only needs a hazard for which the integral above is bounded, and since choosing \(\Delta T\) from an exponential probability distribution can yield any value, problems will occur. The solution in the general case is the same: set the hazard to a constant value after a \(t_{\rm max}\) value which exceeds the lifetime of a person. The detailed calculations for this procedure can be found in this document: hazard_tmax.pdf.